
Инструмент «Видимость» модуля MapInfo Pro Advanced позволяет определить все ячейки грида, которые визуально соединены с одной или несколькими точками наблюдения. Другими словами, он позволяет выявлять области на регулярной поверхности, которые находятся в зонах видимости из одной или нескольких точек. Если еще проще - инструмент ответит на вопрос «откуда видно меня?» или «что мне видно отсюда?».
Входной растр может представлять собой цифровую модель местности (DTM) или же цифровую модель поверхности (DSM), включающую в себя здания, растительность и др. Для расчета пользователю необходимо указать только точки расположения целей, а позициями наблюдения будут все ячейки входного растра.
Одним из прикладных применений инструмента «Видимость» может стать определение расположения ветрогенератора или проектирование целой ветряной электростанции. Появление ветроэнергоустановок в привычном природном пейзаже нарушает его гармонию, поэтому обычно ветровые генераторы стараются размещать там, где их никто не видит. Еще одно применение - размещение вышек сотовой связи. Анализ видимости определит их покрытие, и поможет спроектировать размещение и высоту вышки так, чтобы её видимость была максимальной.
В простейшем случае у нас есть одна цель и несколько наблюдателей. Цель размещается пользователем в некоторой позиции в пределах поверхности, а инструмент сам помещает наблюдателя в центр каждой ячейки сетки, окружающей цель, на некотором заданном радиальном расстоянии. И цель, и наблюдатели могут быть смещены по вертикали на некоторую высоту над реальной местностью. При таком расположении анализ видимости может ответить на следующие вопросы:
1. Какие наблюдатели видят цель?
1) Выходной растр записывает результат для каждого наблюдателя как ноль или один - видимый или невидимый. В качестве альтернативы вы можете вывести классифицированный растр с двумя классами - видимым и невидимым.
2) Это также отвечает на вопрос - каких наблюдателей видно с цели? Статистический анализ выходного растра покажет вам величину области, в которой можно увидеть цель.
2. Насколько выше должен располагаться каждый наблюдатель, чтобы увидеть цель?
1) Выходной растр записывает результат для каждого наблюдателя. В идеале этот результат должен быть равен нулю или отрицательному значению, представляющему расстояние по вертикали, на которое наблюдатель должен быть поднят, чтобы увидеть цель.
3. Насколько ниже можно разместить цель, чтобы она все еще была видна каждым наблюдателем?
1) Выходной растр записывает результат для каждого наблюдателя. В идеале этот результат должен быть равен нулю или положительному значению, представляющему расстояние по вертикали, на которое цель может быть опущена и по-прежнему видна всеми наблюдателями.
Помимо нескольких наблюдателей, у нас также может быть и несколько целей. При таком сценарии мы можем ответить на следующие вопросы:
4. Сколько целей видит каждый наблюдатель?
1) Выходной растр записывает результат для каждого наблюдателя в виде целого числа видимых целей.
2) Дальнейшая обработка растра позволит ответить на вопросы:
а) Какие наблюдатели могут увидеть цель?
б) Какие наблюдатели могут видеть не менее «N» целей?
в) Какие наблюдатели могут видеть все цели?
По умолчанию анализ видимости отвечает на вопрос (1). Чтобы ответить на вопросы (2) и (3), вам необходимо включить параметр «Использовать сложное вычисление», который доступен в качестве опции, если в «Режиме видимости» указана «Отдельная точка». Хотя анализ отвечает сразу на два вопроса в этом режиме, результат выводится как один растр, где знак числовых значений определяет результат. Это можно резюмировать следующим образом: наблюдатели, которые не видят цель, имеют отрицательные значения; возвращаемые значения - это расстояние по вертикали, на которое наблюдатель должен быть поднят, чтобы цель была видна. Наблюдатели, которые могут видеть цель, имеют положительные значения; возвращаемые значения - это расстояние по вертикали, на которое цель может быть опущена и при этом оставаться видимой.
Чтобы ответить на вопрос (4), вам необходимо включить параметр «Вычислить взаимную видимость», который доступен в качестве опции, если в «Режиме видимости» указано «Несколько точек (TAB.)». В этом режиме выходной растр записывает целочисленное количество целей, которые могут быть видны из каждого местоположения наблюдателя.
Рассмотрим работу инструмента на конкретном примере - выборе места для размещения новой ветряной электростанции на побережье Малл-оф-Кинтайр, на юго-западной оконечности полуострова Кинтайр в Шотландии. Для расчетов были взяты два набора растровых данных Британской геодезической службы: DTM с разрешением 50 метров и топографическая карта в масштабе 1:50 000. Оба набора были скачаны в виде тайлов, которые были объединены в единые растры MRR для простоты использования. Далее в MapInfo Pro оба этих растра были наложены друг на друга с применением прозрачности для слоя DTM.
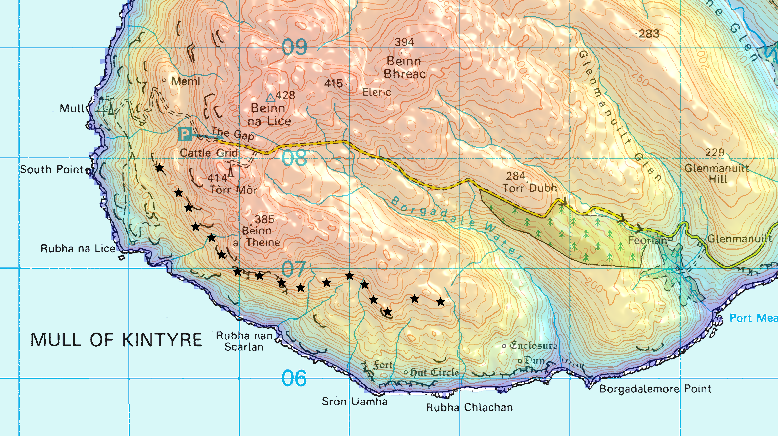
Затем в новом слое с помощью инструмента «Точка» по изогипсе со значением 250 метров, проходящей вдоль береговой линии, были нанесены 15 точек, соответствующих расположению ветрогенераторов.
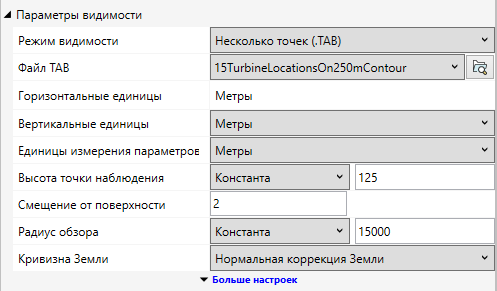
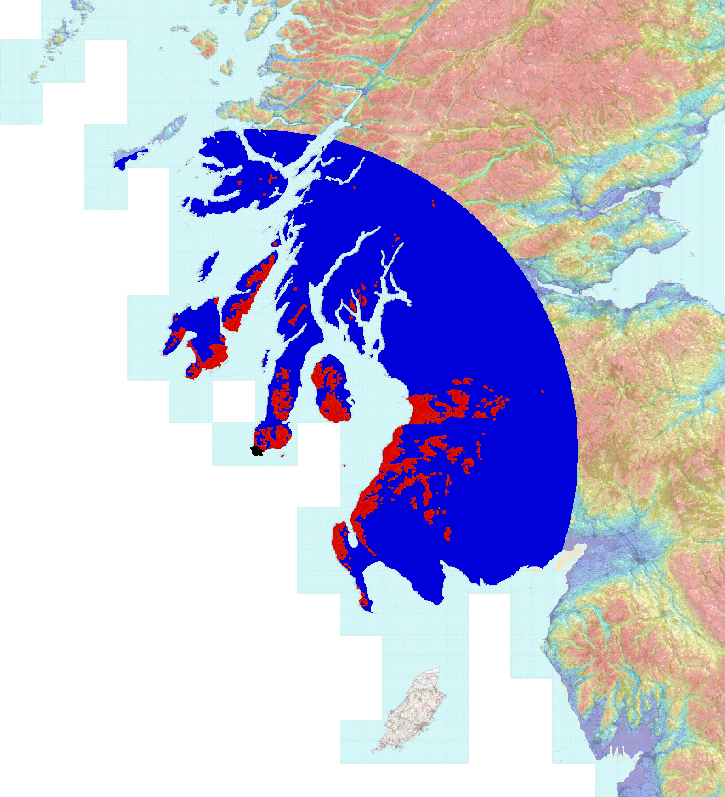
В первую очередь расчет покажет места в Великобритании, откуда можно будет увидеть эти ветровые турбины. В данном примере целями являются 15 турбин, а каждая ячейка сетки цифровой модели с разрешением 50 метров (2500 квадратных метров) имитирует одного наблюдателя. Для выполнения подобного расчета выберем режим видимости «Несколько точек», чтобы указать несколько целей. Укажем новую созданную нами таблицу, содержащую точки расположения турбин, и оставим все единицы в метрах. Необходимо указать высоту каждой цели, которая в данном конкретном примере составляет 125 метров для каждого генератора. При необходимости в таблице можно создать еще одну колонку и указать высоту для каждой цели отдельно. Для каждого наблюдателя укажем смещение 2 метра, чтобы каждый из них был слегка приподнят над поверхностью местности. Анализ проводится в радиусе 150 километров от каждой турбины. Опять же, можно было указать радиус для каждой турбины отдельно через еще одно поле в таблице. Наконец, выберем вариант «Нормальная коррекция Земли» в опции «Кривизна Земли» для включения кривизны Земли в анализ, что рекомендуется делать для всех видов анализа в режиме прямой видимости.
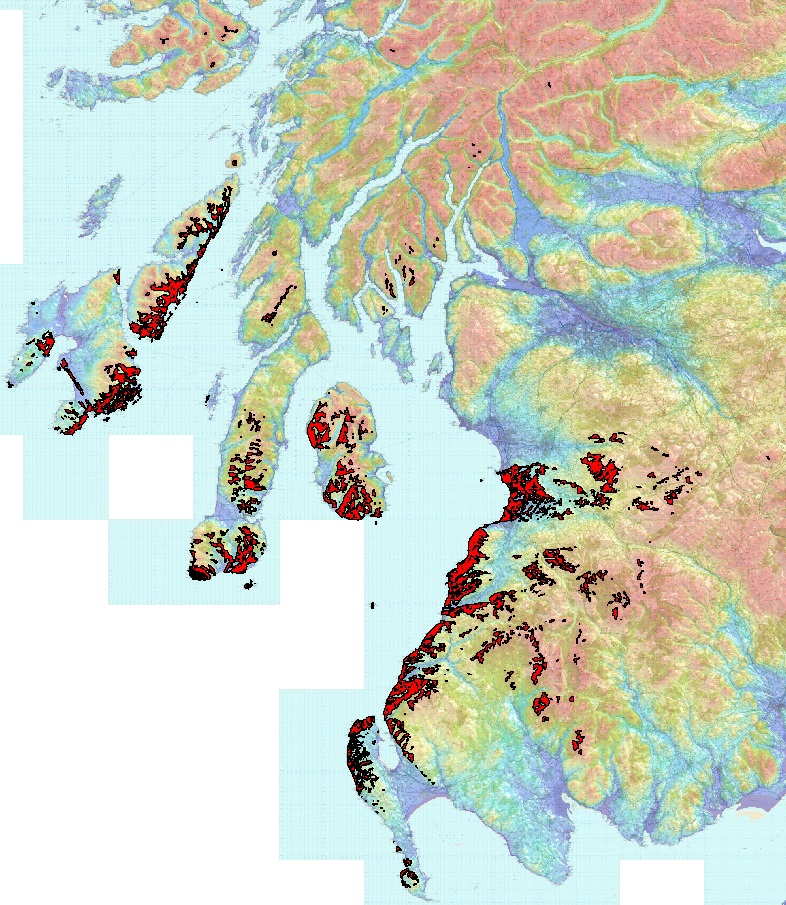
В результате мы видим четко выраженный, заданный нами, радиус анализа. Синим цветом показаны наблюдатели, которые не видят ветрогенераторов, а красным - наблюдатели, которые видят.
Также можно отобразить только тех наблюдателей, которые видят турбины.
Есть несколько способов сделать это - параметры рендеринга, калькулятор или полигонизация. В данном случае был использован инструмент «Полигонизация», чтобы преобразовать области, где наблюдатели могут видеть ветровой генератор, в многоугольники. Теперь наглядно отображены только зоны видимости, и мы можем провести анализ полученных данных и сказать, что теоретически в хороший ясный день турбины будут видны на расстоянии почти 150 километров.
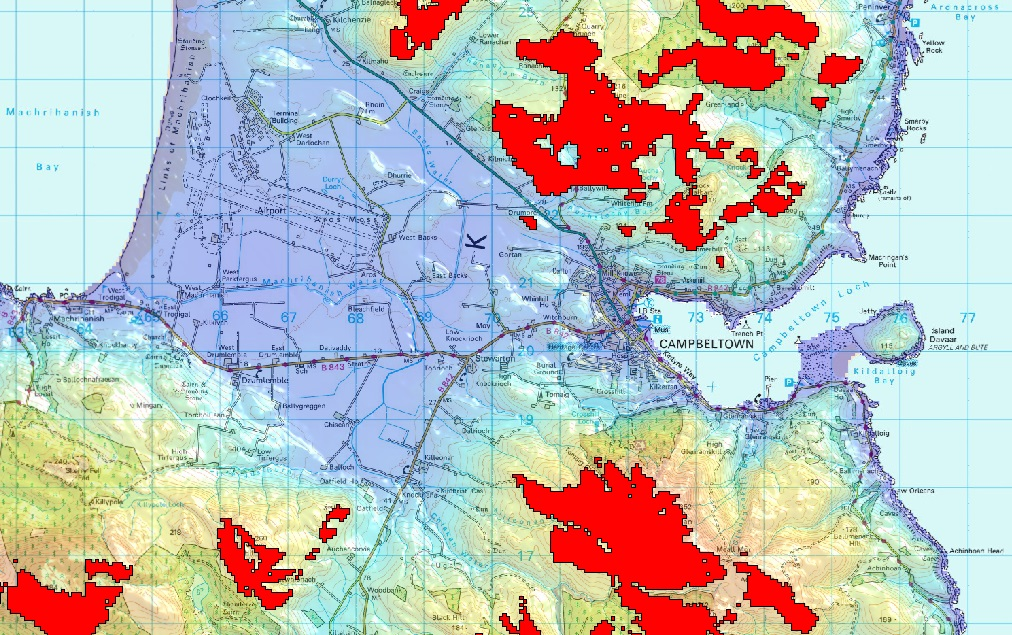
Дальнейший более детальный разбор может выявить интересные особенности. Например, в городе Кэмпбелтаун, расположенном по соседству с выбранным нами местом для ветряной электростанции, на этом же полуострове, турбины видны с окружающих город холмов, но сами жители Кэмпбелтауна их не увидят.
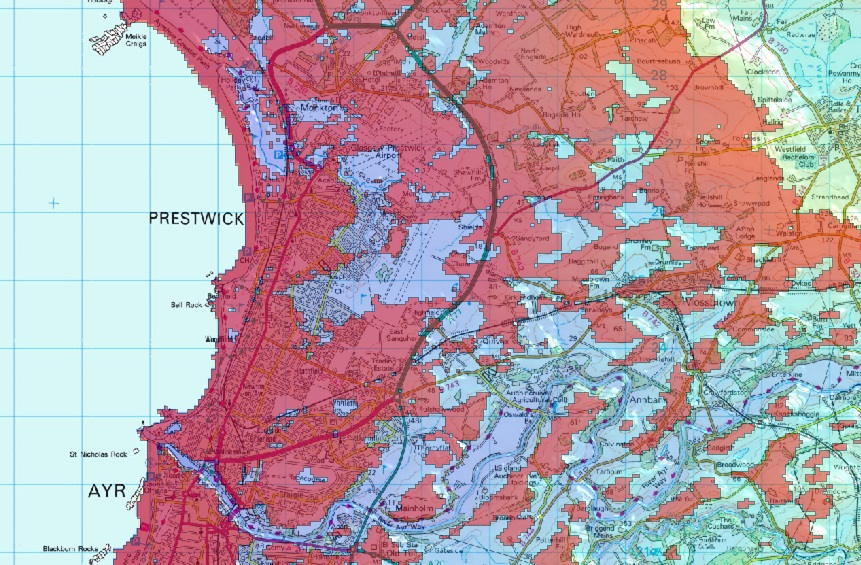
В то время как с материка жителям Престуика и Эр на ветрогенераторы будет открываться хороший вид. Однако находясь на расстоянии более чем в 75 километров, они вряд ли будут очень расстроены этим обстоятельством.
Таким образом, инструмент «Видимость» позволяет с легкостью строить зоны видимости для одной или множества целей всего в пару кликов мыши, а более глубокие настройки открывают множество возможностей для его прикладного использования. Убедитесь в этом сами, скачав пробную версию MapInfo Pro 2019 и воспользовавшись всеми преимуществами модуля MapInfo Pro Advanced в течение 30 дней.
| Построение и анализ поверхности в Mapinfo Pro Advanced |
| Тепловые карты в MapInfo Pro Advanced |
| Анализ лесного полога по данным LiDAR в MapInfo Pro Advanced |